Brushless Motoren und Regler
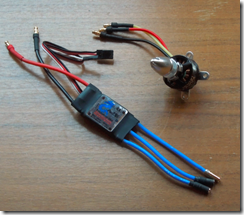
Brushless Motor und Regler Vor einigen Wochen stellte ich fest, dass der Regler nicht immer den Motor so steuert, wie ich es erwarte. Das liegt wohl daran, dass ich mich an die Fahrtenregler für normalere Motoren gerichtet habe. Dass nun die Regler für Brushless Motoren ein paar Merkmale haben, wie sie richtig funktionieren, war mir bis vor kurzem unbekannt. Zum einen sollte das PWM Signal nicht gerade auf 2ms Impuls stehen, da sonst das Menü vom Fahrtenregler angesprochen wird. Die Mittelstellung ist für den Start besser geeignet, also 1,5ms. Brushless Motor. Die drei Anschlüsse sind notwendig um ein Drehstromkreis zu erzeugen. Beim Arduino kann einfach ein PWM Signal erzeugt werden, das genau für einen Servo oder hier für einen Regler geeignet ist. Anders ist es bei dem Netduino, womit sich PWM Signale erzeugen lassen, die nicht mehr für das Regeln geeignet sind. Zwar kann ein Digital Servo mit einer höheren Frequenz durchgesteuert werden, jedoch muss immer das Verh